本资源包括高翔SLAM十四讲1-6章PPT,便于简化理解和日常讲解摘要使用。
”SLAM 十四讲 机器人 建图 PPT“ 的搜索结果
高翔视觉slam十四讲学习(1)
标签: slam
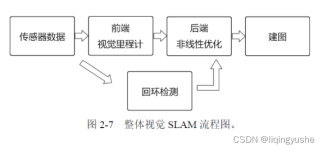
第一章(第一讲、第二讲) 1. SLAM概述 1.1 概念 SLAM(Simultaneous Localization and Mapping):同时定位与地图构建,指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时...

布法罗大学SLAM讲义PPT下载。 1、SLAM 是一种用于在未知环境或已知环境中构建...7、目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域,依靠传感器可实现机器的自主定位、建图、路径规划等功能。 8、


讲座题目:利用多传感器融合技术解决机器人可靠定位导航问题 思岚科技联合创始人兼CTO黄珏珅主讲 视频地址:https://apposcmf8kb5033.pc.xiaoe-tech.com/detail/l_609b41fde4b07163a65b6d20/4
操作环境要求学生需在Linux系统下完成,虽然现在有云端实践平台,但掌握基本的Linux命令依然是必不可少的基础,对于机器人工程专业学生而言,课程体系忽略了这块训练,使此课孤立于课程体系中,无法和现有培养方案...
由 Dora 于 星期四, 2017-05-18 12:00 发表 思岚科技专栏 作者:思岚科技 地图的四种表示方法 智能服务机器人正成为行业的风口浪尖,从清扫...同时,作为自主定位导航技术的重要突破口,SLAM 技术也成为关注焦...

SLAM的全称是Simultaneous Localization and Mapping即时定位与地图构建,为解决机器人自主导航的问题。人在一个未知的环境下也不知如何行进,我们闭着眼睛也不知道怎么走路,机器人如人一样,也需要一个“眼睛”与...


作者 | 大疆创新RoboMaster技术总监YY硕▌前言很多朋友私信问我对机器人和人工智能感兴趣,该怎么展开学习。最近稍微有点空,我写写我的看法。两年前,我在知乎回答如...



全国第三届SLAM技术会议记录
标签: 计算机视觉

无人驾驶–实时定位与地图构建(SLAM)仿真与实战(附源码) 一个SLAM的技术小结,供自己回顾也为后人学习提供参考。 另外建了一个无人驾驶方面的微信交流群,有兴趣的同行或者专家学者可以加我微信:wxl609278502 ...
23年6月初终于尘埃落定,今年受大环境影响,这一路可以说是步履维艰,我的投递的行业主要面向机器人和自动驾驶,投递岗位大部分是算法工程师,其中也包括C++开发和少量的测试岗,在面试过程中加深了对车企、自动驾驶...
SLAM introduction 很详细的介绍了SLAM原理
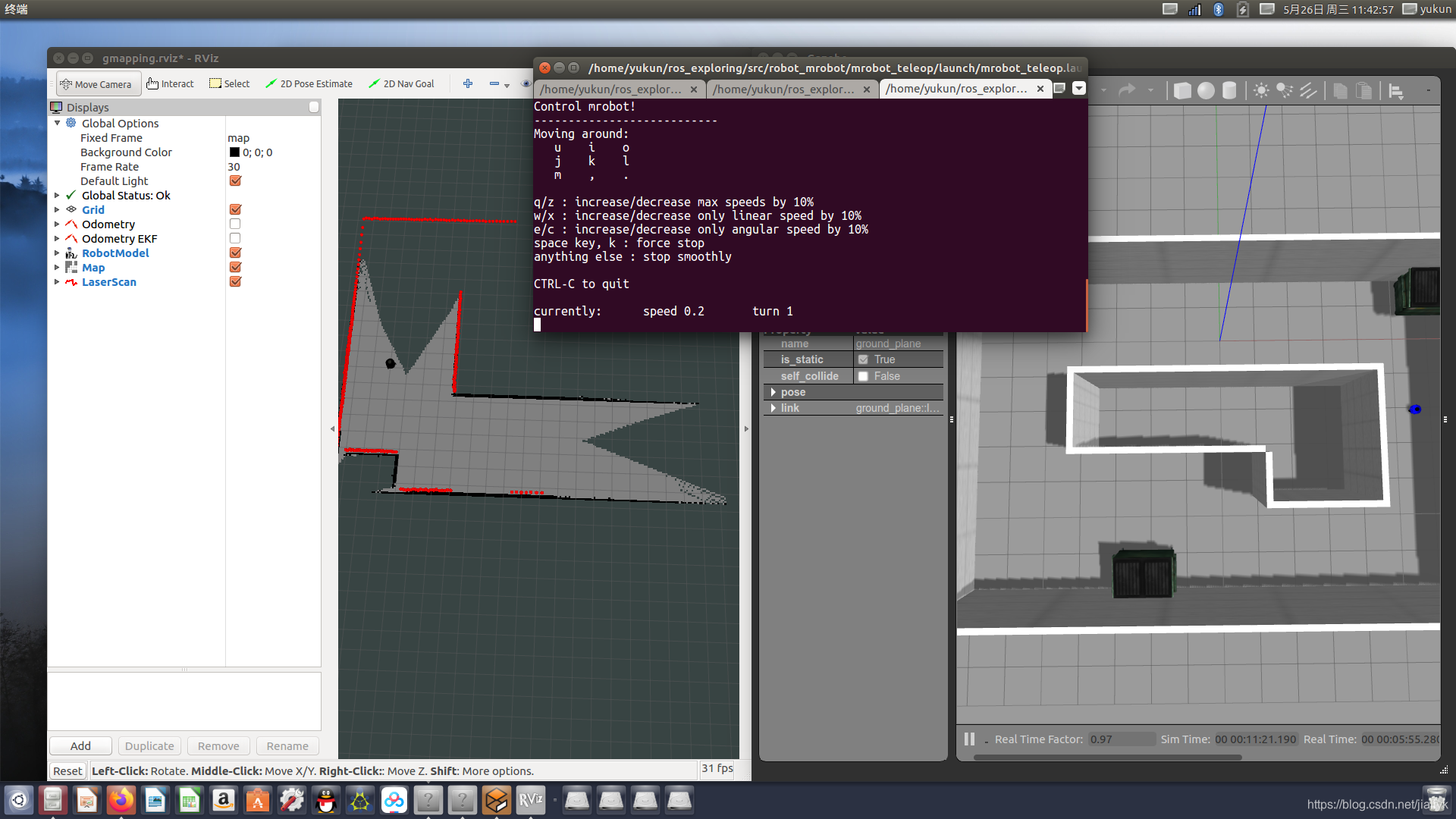
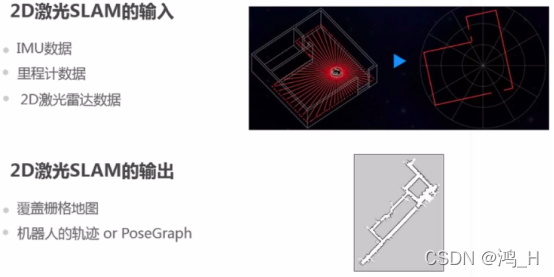
激光SLAM系统框架在激光SLAM系统中,Gmapping获取扫描的激光雷达信息以及里程计数据可动态的生成2D栅格地图。导航包则利用这个栅格地图,里程计数据和激光雷达数据做出适合的路径规划和定位,最后转换为机器人的速度...
机器人(ROS)理实融合课程设计与开展 参赛信息表 姓名 *** 性别 男 教龄 5年 电话 *************** 邮箱...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上...

关注了「泡泡机器人SLAM」专栏平台,上面有很多公开的视频,涵盖多种SLAM技术及其算法的视频、PPT和代码资源,属于公开,转载请注明。第一期0.SLAM基础知识 高翔 ppt&video1.工业相机选型及介绍-刘富强:链接:...
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地